System Spotlight: Swerve Drive
Each robot is designed and built from the ground up. This year the team decided to try something new with the bot's drive system. Every year the robots designed by team 1323 were driven by a tank style drive system, with two sets of three wheels which would spin at different speeds to turn, then at the same speed to move forward.
Instead of using this traditional design, 1323 is using a swerve system. Swerve drives operate like creepers that mechanics use to get underneath cars, in that each wheel can roll in any direction. Using this system, the robot can face forward, but move in any direction easily, which will help it to effectively grab boxes from the field and deposit full stacks in scoring zones.
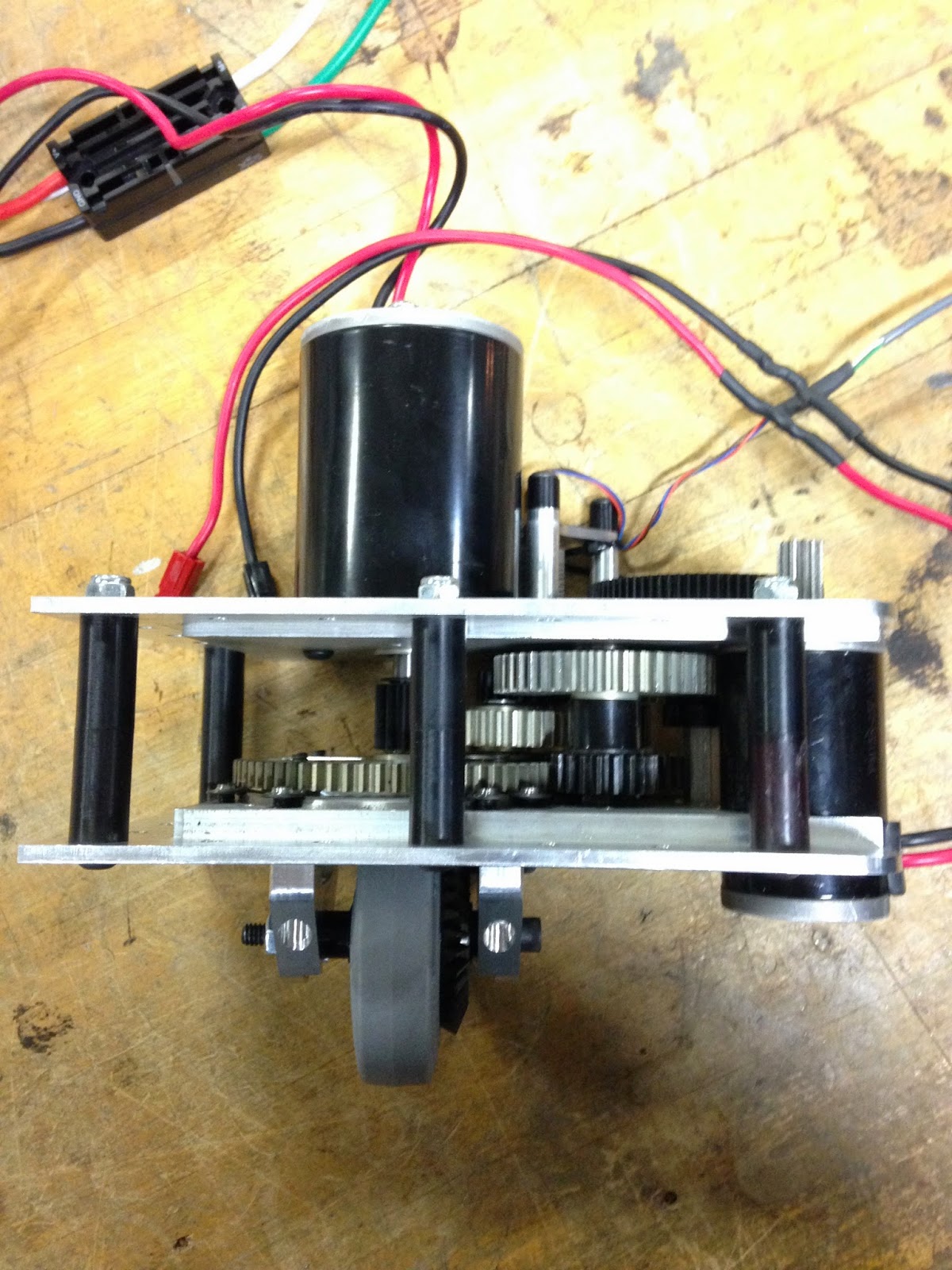
This new drive system requires two motors per wheel to rotate and drive. One motor rolls the wheel forward or backward, while a small motor pivots the wheel to oriented in the desired direction. This is achieved by having a gear on the shaft that holds the wheel, and a gear above the wheel casing. The gear on the wheel shaft is spun to drive it, while the gear that moves with the casing is driven to reorient each wheel. Four of these swerve gearboxes will be mounted on the corners of the robot, which widens the supportive base and prevents tipping.
Gearbox plates, shafts, and wheel mounts were made in house while gears were shaved down using the team's equipment to reduce weight.
No comments:
Post a Comment